






车体(长/宽/高)
最大载重
整车装备质量
爬坡能力
电池类型
最大行驶车速
充电方式
驱动方式
模块化设计、支持L4级自动驾驶软件栈、提供可访问的硬件接口、提供硬件安全冗余。

车体(长/宽/高)
最大载重
整车装备质量
爬坡能力
电池类型
最大行驶车速
充电方式
驱动方式
模块化设计、支持L4级自动驾驶软件栈、提供可访问的硬件接口、提供硬件安全冗余。
车体(长/宽/高)
最大载重
整车装备质量
爬坡能力
电池类型
最大行驶车速
充电方式
驱动方式
模块化设计、支持L4级自动驾驶软件栈、提供可访问的硬件接口、提供硬件安全冗余。

车体(长/宽/高)
最大载重
乘坐人数
爬坡能力
电池类型
最大行驶车速
充电方式
转弯半径
均采用线控系统,自动驾驶套件条件下可实现无人驾驶。

车体(长/宽/高)
最大载重
整车装备质量
爬坡能力
电池类型
最大牵引力
充电方式
最大行驶速度(空载)
均采用线控系统,自动驾驶套件条件下可实现无人驾驶。

无人驾驶清扫车智小蜂集激光雷达、摄像头、超声波雷达等传感器于一体,实现自主作业。清扫车脱离人工操作,自主在路面上完成清扫、洒水、垃圾收集等工作。智小蜂的出现极大地提高了清洁效率、降低了人工成本, 同时让清洁更智能。

车体(长/宽/高)
最大载重
乘坐人数
爬坡角度
电池类型
最高车速
充电方式
转弯半径
均采用线控系统,自动驾驶套件条件下可实现无人驾驶。

智小兵无人巡检车,通过国内领先水平的自主定位和导航技术,自主定位、成图、导 航、避障,可以按照规定路线巡检。无需事先提供厂区地图,无需增加特。 定标识,不破坏环境,不需要施工,节约成本,缩短了工期;配备热成像仪、可见光摄像头、红外摄像头,可以全天候工作。同时支持平整路面以及山地、丘陵地形;适应高温、高寒、雨雪雾等恶劣天气。

| 整车参数 | ||
|---|---|---|
| 总长mm | 1265 | |
| 总宽mm | 750 | |
| 总高mm | 424 | |
| 整备质量kg | 210 | |
| 防护等级 | IP35 | |
| 底盘及性能 | ||
|---|---|---|
| 转向形式 | 电机差速驱动 | |
| 制动形式 | 电机反拖制动 | |
| 悬架形式 | 克里斯蒂悬挂 | |
| 出厂速度 km/h | ≤7 | 0-30km(出厂前可调) |
| 转弯半径 m | 0 | 可原地转向 |
| 爬坡角度 % | ≤25 | |
| 越障高度cm | 35 | |
| 垂直负载 kg | 220 | |
| 电驱 | ||
|---|---|---|
| 电机类型 | 永磁同步电机 | |
| 电机功率 W | 2000(单个)*2 | |
| 驱动形式 | 后驱 | |
| 电池参数V/Ah | 48/90 | |
| 电池工作温度 ° | -10~60° | |
| 充电器 | AC220V 独立充电器 | |
| 充电时间 h | ≤5 | 可定制快充 |
| 对外供电 V/W | 12/500 | 可定制48V |
| 防护等级 | IP35 | 可定制IP66 |
| 其他 | ||
|---|---|---|
| 通讯型式 | CAN通讯 | |
| 运动控制 | VCU控制 | |

| 底盘参数 | ||
|---|---|---|
| 长*宽*高 mm | 1150*635 | |
| 轮距 mm | 556 | |
| 轴距 mm | 500 | |
| 轮胎规格 | 3.0-8 | 轮胎直径350 mm左右 |
| 最小离地间隙 mm | 91 | |
| 整备质量 kg | 98 | |
| 额定载荷 kg | 200 | |
| 底盘及性能 | ||
|---|---|---|
| 驱动形式 | 前阿克曼转向;后轮毂电机驱动 | 转向控制精度0.1deg |
| 电驱 | ||
|---|---|---|
| 电机类型 | 后桥电机 | 永磁同步电机 |
| 电机功率 W | 450 | |
| 电池参数V/Ah | 48/30 | 锂电 |

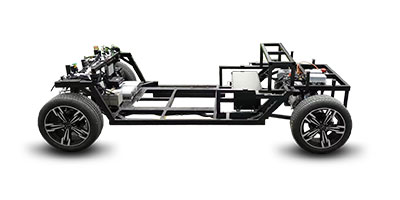
| 底盘参数 | |||
|---|---|---|---|
| 尺寸 | 4050×1900 | 制动距离 | ≤4m |
| 最大载荷 | 4000kg | 最大行驶速度 | 18km/h |
| 前、后轮距 | 1320/1320mm | 续驶里程 | 50km(可定制) |
| 轴距 | 3250mm | 最大爬坡度 | 20% |
| 最小转弯半径 | 4.5m | 最小离地间隙 | 150mm |
| 动力传动系统 | 无极变速系统 | ||
| 转向系统 | 循环球+EPS线控 | ||
| 前桥及悬挂 | 前后安装板式钢板弹簧 | ||
| 后桥及悬挂 | 全浮整体式后桥、钢板弹簧非独立悬挂 | ||
| 制动系统 | 前后轮液压制动+EHB线控制动+线控拉索驻车 | ||
| 轮胎 | 700-12寸 | ||














